 بازی آنلاین
بازی آنلاین آپلود عکس
آپلود عکس







معرفی فرضیه <گ چ پ ژ> -بخش اول
لابد شما هم مانند من قبول دارید کسانی که فیزیک قرن بیستم و بیست و یکم را دنبال کردهاند، همگی دچار سردرگمی مهلکی شدهاند. درگیری با پرسشهای بنیادین در باره ماهیت فضا، زمان، ابعاد پنهان، نقش ناظر، ماده تاریک، انرژی تاریک و…
سال پیش کتابی را ترجمه کردم به نام “گرانش وجود ندارد” به قلم “Vincent Icke” استاد فیزیک با سابقه دانشگاه آمستردام. در پایان کتاب نویسنده اظهار امیدواری کرده بود که “پسری یا دختری از هزاره جدید” زودتر دست به کار شود و طرحی نو دراندازد. در این کتاب آمده: «علم همانند اسلوب تاریخ انسانی یا معماری مدرن، پیشرفت نمی کند: تکه تکه کردن و سوزاندن، منفجر کردن و نابود کردن، و بر روی ویرانه ها چیزی ساختن که به هیچ وجه مشابه قبل نیست. برعکس، یک دانشمند خوب بیشتر شبیه یک دندانپزشک خوب است: دور انداختن هر چه را نمی توان نگه داشت، بقیه را همانطور که بوده باقی گذاشتن، نصب جایگزینها، و بهبود عملکرد کلی.»
هر چند من فیزیکدان متخصص نیستم، ولی دندانپزشک هستم و شاید از سر مطایبه بتوان گفت همین شد که بالاخره تصمیم گرفتم “فیزیک خودفهم” خودم را بنا کنم. نتیجه آن سفرنامهای یکساله از پرسه زدن در مفاهیم فیزیک شد. از ساده ترین ادراکهای مشترک سفرم را شروع کردم(مانند اینکه ما همواره جهان را دو بعدی می بینیم، یا ما فقط حرکت –تغییر را می بینیم نه خود فضا زمان به عنوان “یک چیز”،یا تناظر حرکت چرخشی و خطی و ..). در این مسیر به موضوعات متفاوتی در فیزیک و ریاضی برخوردم. سعی کردم آنچه را از نشانه ها میفهمم، به نگارش در بیاورم. از آنجا که ذهن من به زبان فارسی می اندیشد، نشانههای فارسی را بکار بردم. در این فرضیه زمان دو بعد دارد که سطحی از اطلاعات را بیان می کنند. هر آنچه توسط “ناظر” دریافت می شود،”اطلاعات” یک “رویداد” است که در قالب یک”جهان” بیان می شود.
<گ> به معنی رویداد.
<چ> به معنی جهان.
<پ> ناظر و
<ژ> اطلاعات هستند.
• اگر کمی گیج شدهاید حق دارید. اما از شما میخواهم که با من در این سفر همراه باشید. در این مسیر خواهیم دید که چگونه به پرسشهای عمیق و اسرارآمیز فیزیک و نجوم پاسخ خواهیم داد. شاید فهرستی از مفاهیم و نتایج معادلات این نظریه که با مقادیر اندازهگیری شده موافق است، شما را ترغیب کند:
۱-مفهوم زمان-فضا
۲- مفهوم دما
۳- مفهوم جهان هابلی
۴- ماده تاریک
۵- انرژی تاریک
۶- اندازهگیری فرکانس تابش پس زمینه کیهانی
۷- اندازهگیری دمای فضای خالی در جهان ما
۸- اندازهگیری شعاع پروتون و الکترون
۹- اندازهگیری شعاع اتمی هیدروژن
۱۰- اندازهگیری شعاع جهان
۱۱- اندازهگیری بار الکتریکی پایه
۱۲- و شاید مهمتر از همه اندازهگیری “ثابت ساختار ریز”
• اگر دانستههایی از ریاضیات و فیزیک دانشگاهی نداشته باشید، شاید پیش رفتن در همه مباحث کمی مشکل باشد. ولی ماهیت کلی مباحث سرراست است و در هر فصل تلاش کردهام که از معادلات مربوطه بیاورم تا خواننده مشتاق بهتر واکاوی کند. بالاخره این فرضیه در قالب یک کتاب، جمعآوری شد و نسخهای برای اغلب فیزیکدانان دانشگاههای داخلی و خارجی ارسال شد.
ولی آنچه مرا وادار به نگاشتن این فرضیه کرد، تحریک دوستداران و دانش آموختگان جوان بود تا با ذهنی منعطف، امکان وجود چارچوبی تازه بیازمایند. در چند قسمت آینده مباحثی از آشنایی با مفاهیم اولیه فرضیه را خواهم نوشت. هدف نهایی این است که بعد از ترجمه به زبان انگلیسی و ویرایش نهایی، با همکاری “سایت علمی بیگ بنگ” کتاب را چاپ و در اختیار علاقمندان قرار دهیم. از اینرو از همه خوانندگان خواهش میکنم، نظرات خود را با من در میان بگذارند.
حرکت به معنای اطلاعات:
در این فرضیه، جهانی تعریف می شود که باید مورد ادراک قرار بگیرد. ادراک، بنیان اصلی جهان می باشد. هر رویداد «گ»، حاصل تعامل جهان «چ» و ناظر «پ» می باشد. در واقع رویداد به شکل واحدهایی از اطلاعات «ژ» دریافت می شود. وجود اطلاعات، به معنای وجود تغییر میان دو حالت متوالی از جهان است. سادهترین نوع تغییر، حرکت است. حرکت مبنایی را فراهم می کند که از طریق آن می توان زمان و مکان را تعریف کرد.
حرکت به دو معنا قابل بررسی است:
۱-حرکت در بعد فضایی:
میزان تغییر در موقعیت فضایی سوژه، میزان اطلاعات را تعیین می کند.
۲-حرکت در بعد زمانی:
این حرکت توسط ناظر و به روی محور زمانی انجام می شود.
• در نظریه (گ چ پ ژ)، ناظر، ماشین ادراک جهان است. نوعی ماشین که با حرکت در بعد زمانی، تغییرات را درک کرده و اطلاعات را پردازش می کند. حداقل شرط لازم، داشتن واحدهای زمانی به روی محورهای زمانی است. در این حالت، ناظر در هر دوره دریافت و پردازش اطلاعات، مقدار تغییر را درک کرده و اطلاعات به واحد بعدی زمانی منتقل می شود.
• تحلیل حرکت – ابعاد مکانی – زمانی:
برای توصیف کامل حرکت یک سوژه، توسط ناظر {مثل خود ما }؛ باید نخست به سه نکته توجه داشت:
1.ناظر اطلاعات جهان را روی صفحه دوبعدی دریافت می کند. از این رو همه اشیاء به صورت موجودات دوبعدی ظاهر می شوند :
یک شیئی سه بعدی، ابتدا به شکل یک تصویر دوبعدی دریافت می شود.
تشخیص بعد عمقی (بعد سوم) سوژه، منوط به دریافت اطلاعات بیشتر است. این اطلاعات را می توان با چرخاندن شیئی به دور یک محور و با چرخاندن شیئی – ناظر نسبت به هم، بدست آورد.
۲-همه حرکتها را می توان در یک صفحه دو بعدی بیان کرد:
حرکت همزمان در سه بعدی بی معناست.
(در واقع همانطور که خواهیم دید، حرکت در سه بعد به معنای وجود انرژی است).
البته، در مورد موقعیت نسبی سوژه و ناظر، حرکت همزمان در دو بعد هم بی معناست. همه حرکتها را در حالت حداقلی (دیفرانسیلی) می توان حرکت در یک محور (یک بعدی) دانست. از آنجا که چارچوب مرجع وجود ندارد، یکی را ناظر ثابت و دیگری را سوژه متحرک می بینیم. حرکت نسبی را میتوان روی یک محور خط واصل سوژه-ناظر، تعریف کرد.
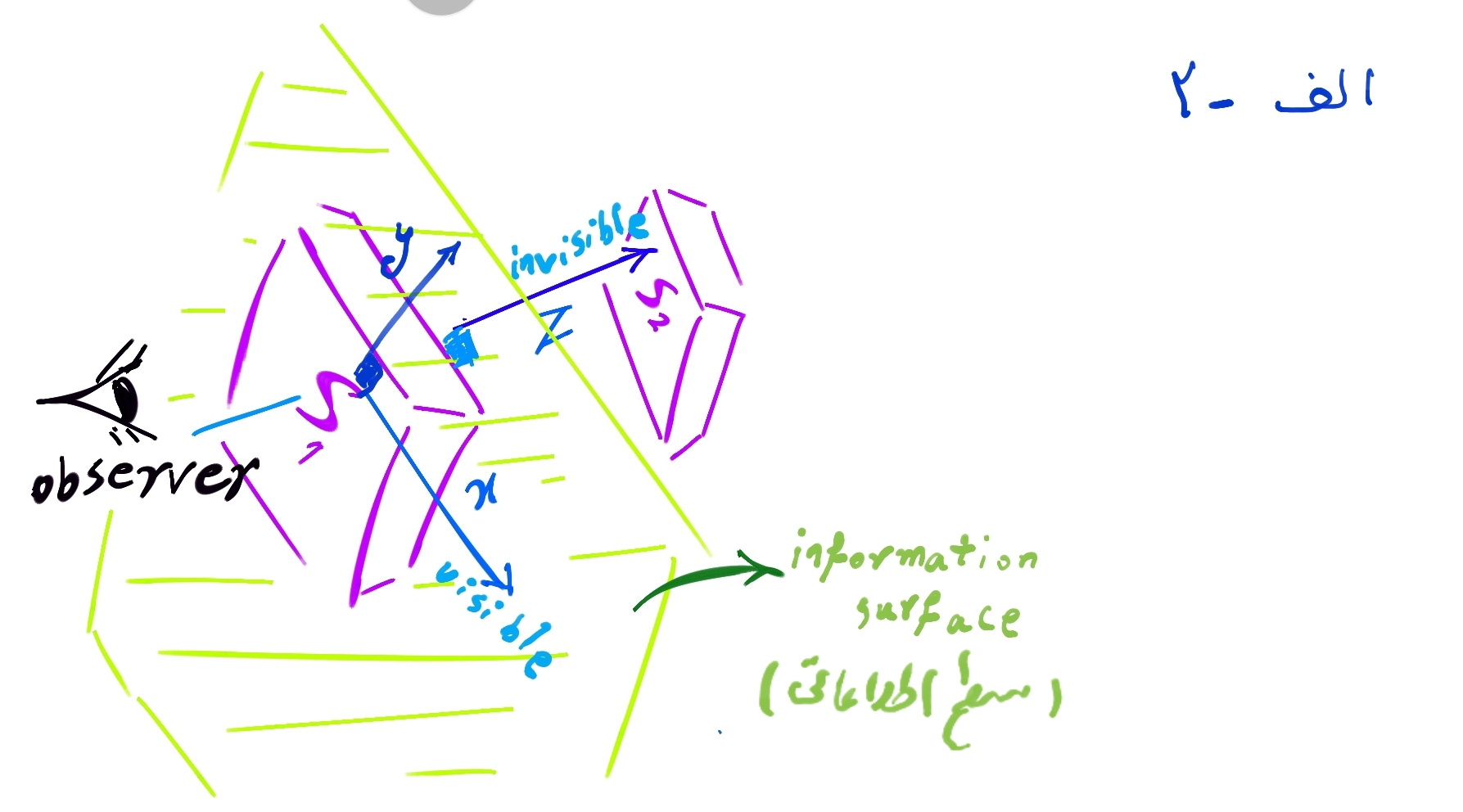
حرکت همزمان در دو بعد، به معنای تغییر در اندازه سطحی سوژه است. چنین تغییری در حرکت عمقی (به سمت عمق صفحه دریافت اطلاعات از جهان) دیده می شود. اگر چه این حرکت به شکل نقطهای از دید ناظر، مخفی می باشد، ولی اطلاعات حرکت در محور عمقی را میتوان از تغییر سطح سوژه ( عمود بر حرکت) دریافت.
• در فرضیه (گ چ پ ژ) همه انواع حرکتها، قابل تأویل به حرکت دو بعدی خواهند بود. هر بعد مکانی، متناظر با یک بعد زمانی خواهد بود. از این رو برای تحلیل یک رویداد، فضایی چهار بعدی تعریف می شود.
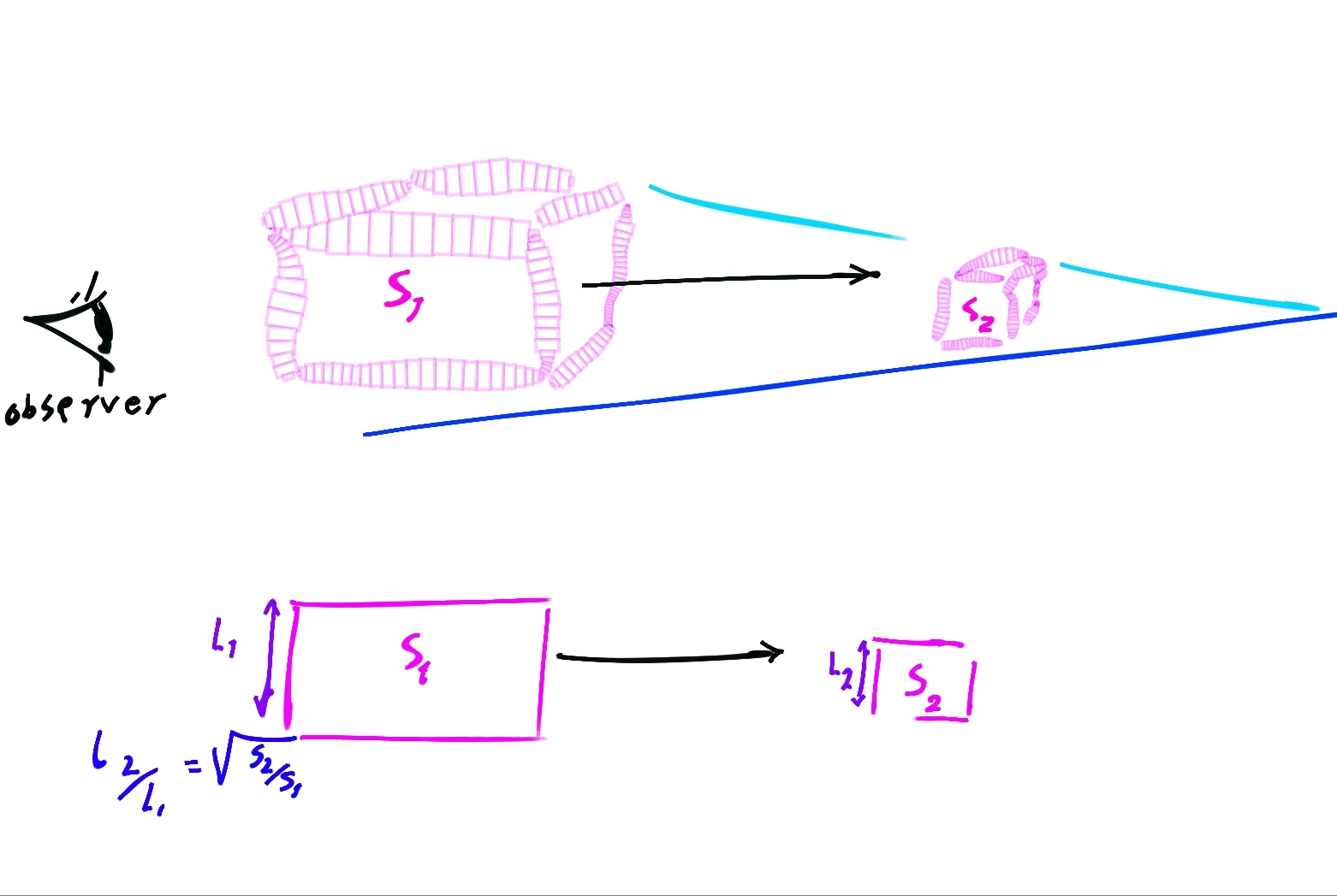
• برای روشن شدن موضوع، حرکت یک جعبه سه بعدی در عمق تصویر را در نظر می گیریم.(شکل ۱-الف)
در جابجایی شیء سه بعدی، اطلاعات به شکل تغییر دو سطح مورد مشاهده (سطح مقطع)، بیان می شود. مثلاً با دور شدن شیئی، سطح مورد مشاهده کوچکتر می شود. برای ناظر، حرکت شیئی سه بعدی در عمق، از طریق تغییر در سطح مورد مشاهده، قابل درک است. برای سادهسازی، می توان یکی از اضلاع (ابعاد) سطح مقطع جعبه را به عنوان محور تغییر، تعریف کرد. در واقع تغییرات سطح، مجذور تغییرات روی یک محور است.
۳-نکته مهم آخر در توصیف حرکت: ناظر، جهان را به شکل دورهای ادراک می کند.
این به معنای وجود یک بازه زمانی مرجع، به روی محور ناظر است. بدون داشتن یک واحد زمانی، تغییرات قابل تعریف نیستند. در واقع سرعت تغییرات به عنوان واحد اطلاعات غیرقابل بیان خواهد بود. از این رو هر حرکتی به هر میزانی از اندازه و با سرعت دلخواه، به معنای یک تغییر صرف بوده و با بقیه متمایز نخواهد بود.
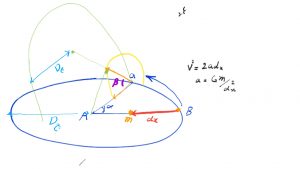
در این حالت شتاب و نیرو قابل تعریف نخواهند بود. ناظری را تصور کنید که در دورههای زمانی نامساوی به یک حرکت شتابدار نگاه می کند. در مورد جابجایی سوژه در حرکت خطی داشتیم:
dx = ½ at2 + v0 t
اگر ناظر نتواند رویداد را در واحدهای زمانی مساوی بیان کند، مقدار t را تعیین نمی کند. او قادر به ادراک (پردازش) اطلاعات رویداد نخواهد بود.{مقدار شتاب a نامعین خواهد بود}
او رابطه dx2 با dx1 را برقرار نخواهد کرد و جهان را ادراک نمی کند.
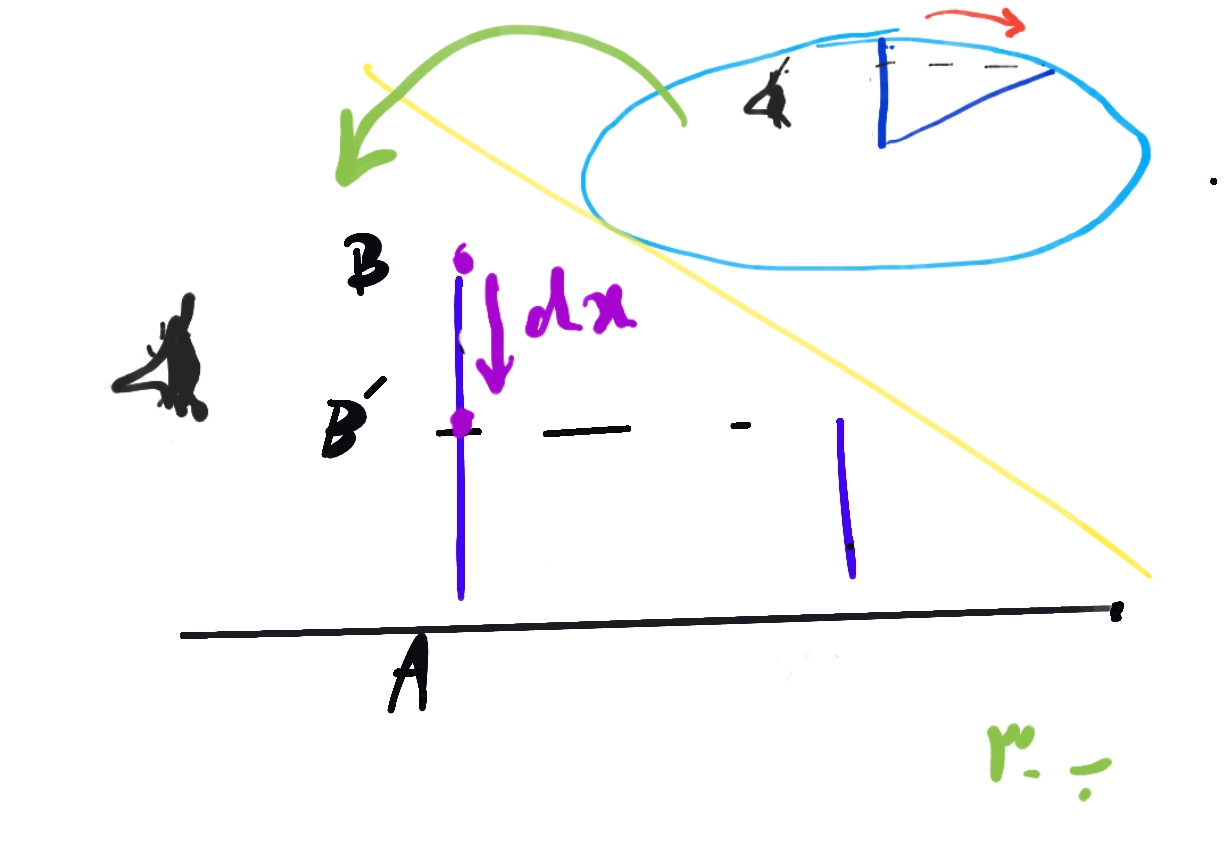
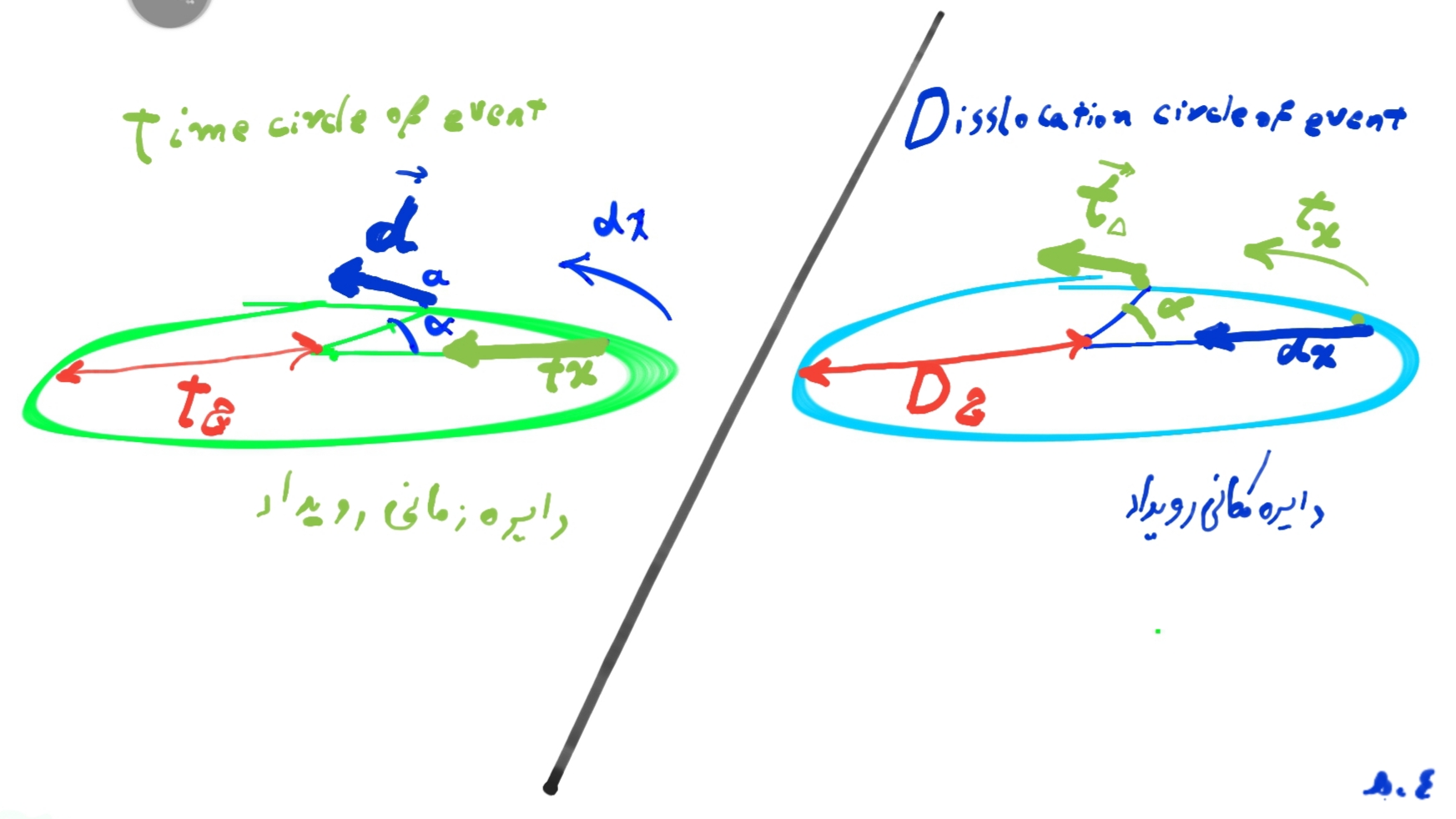
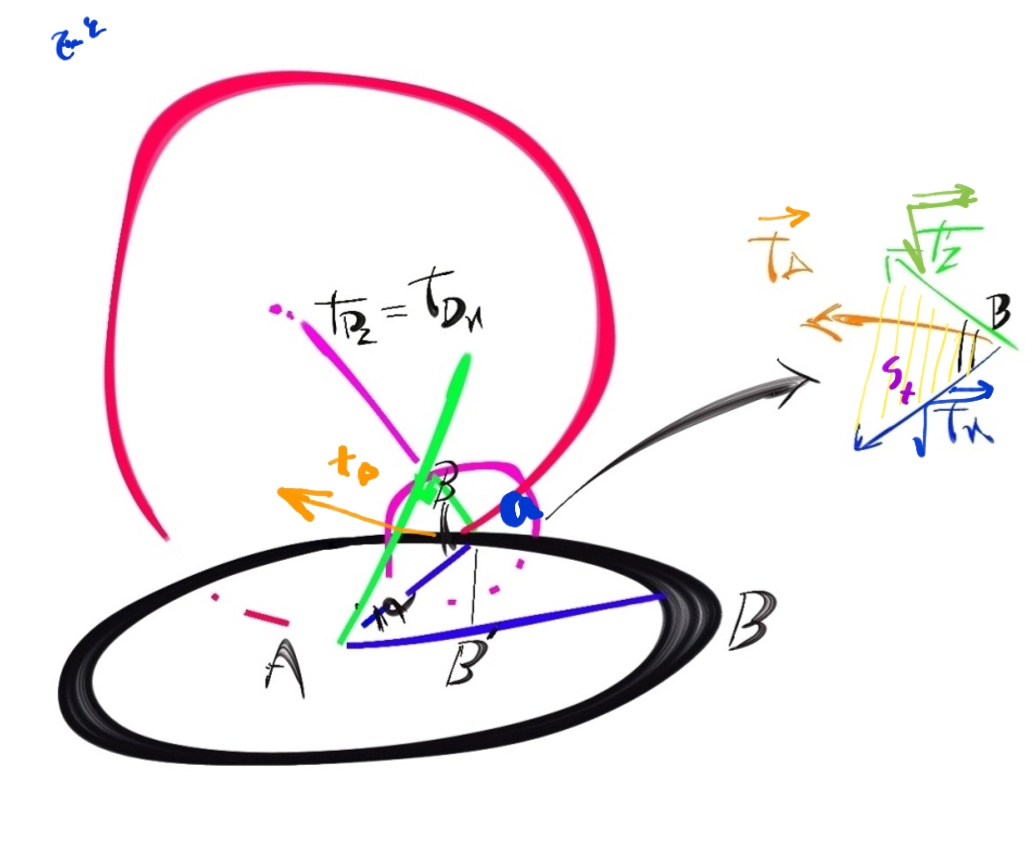
• ناظر با تعریف بردار زمان، حرکت خود در محور زمان را تصویر می کند. روی این محور، بردار یکه tx را تعریف می کنیم؛ تشخیص رویداد، در بازههای زمانی tx صورت می گیرد. بردار زمان tx عمود بر بردار حرکت مکانی قابل تعریف است. از دیدگاه <گ چ پ ژ>، زمان به عنوان بردار اولیه اطلاعات، عمود بر بعد مکانی حرکت است. زمان نه به روی محور بلکه به شکل سطح زمانی تغییر(دیفرانسیلی) برای ناظر درک می شود.
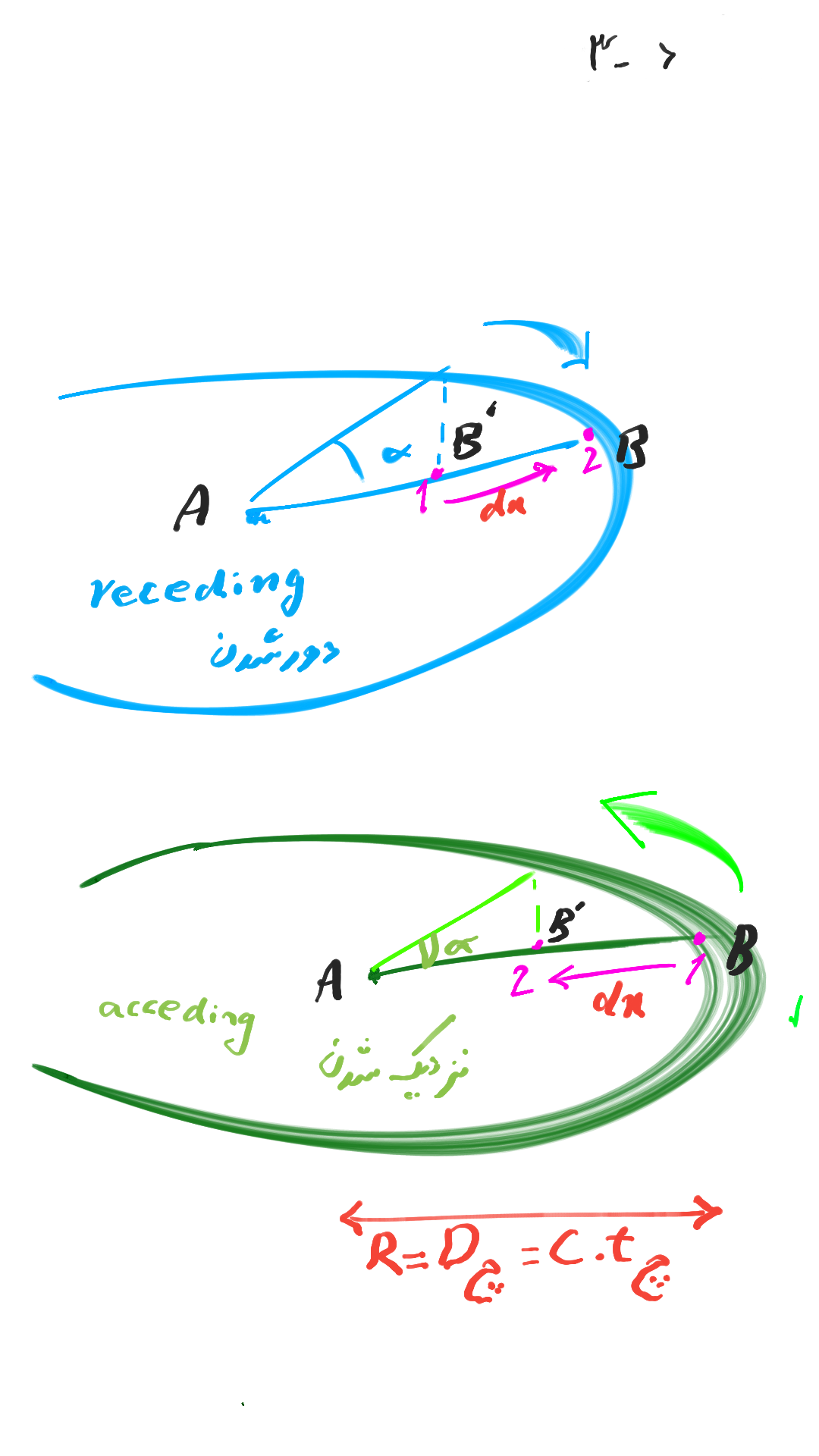
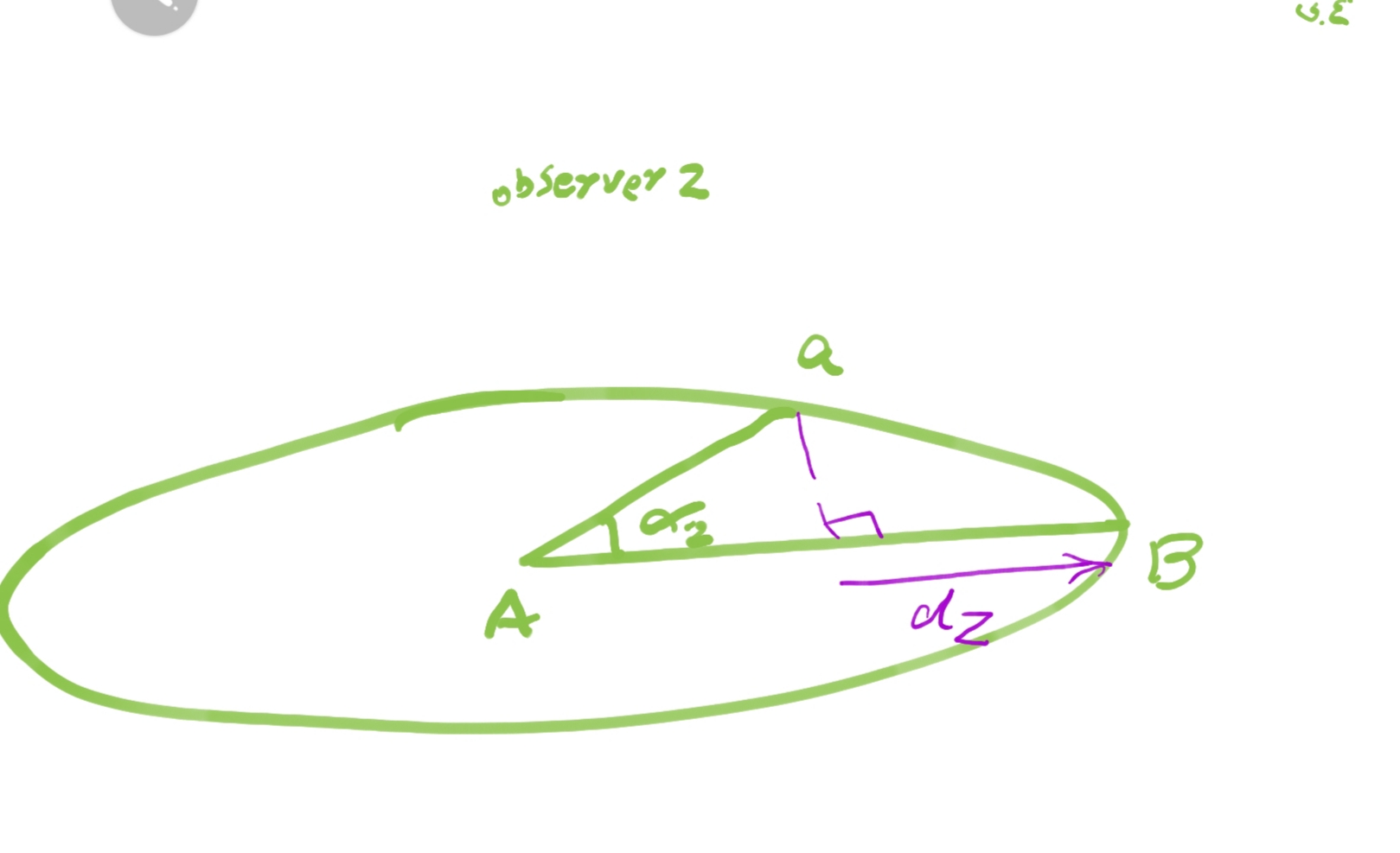
– تشخیص حرکت در عمق، تعریف بردار زمانی دوم:
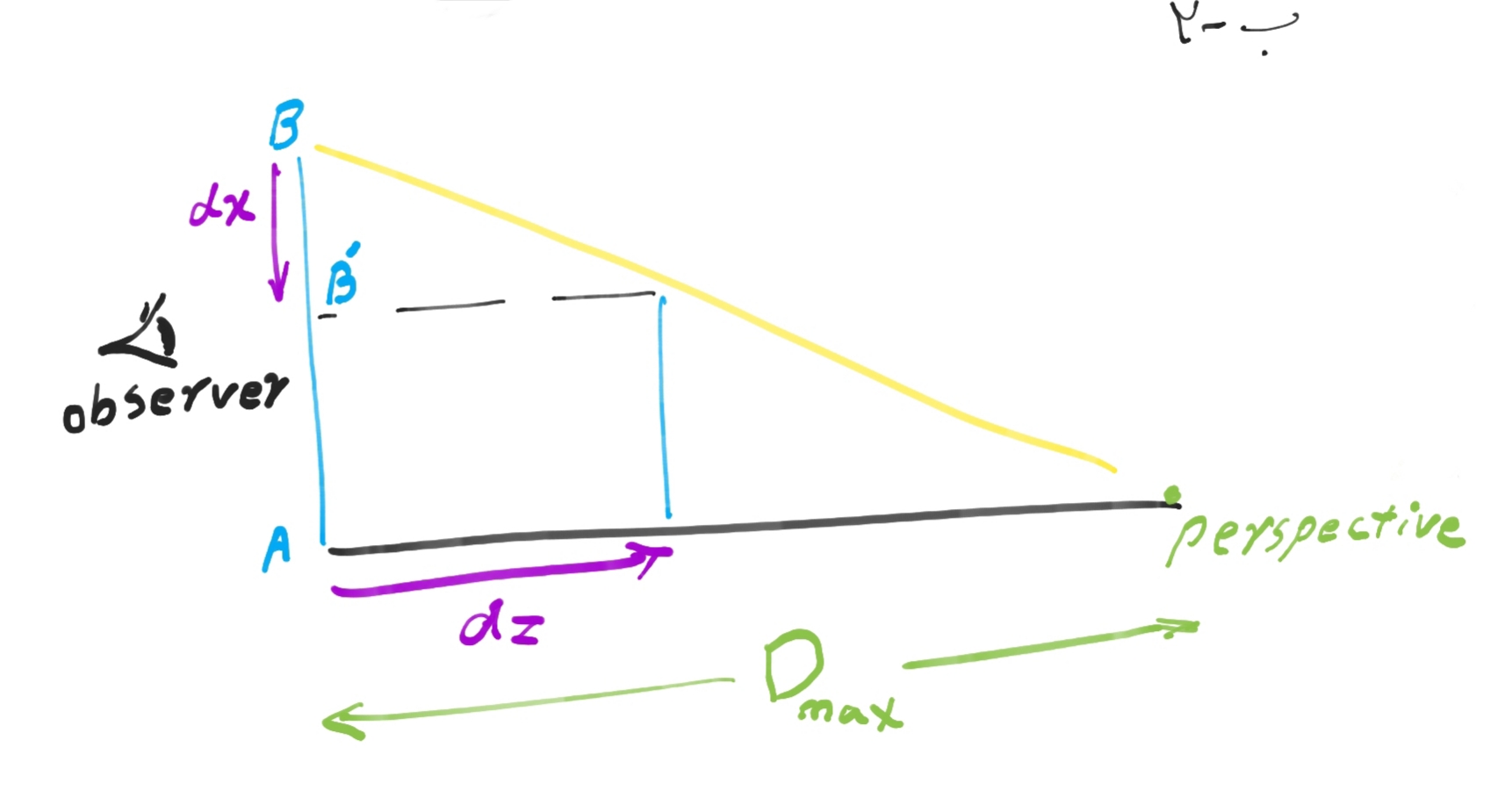
میلهای را تصور کنید که روبروی ناظر ایستاده است و به سمت عمق، از ناظر دور می شود. ناظر در سطح مقطع رویداد، تنها میلهای را می بیند که در حال کوتاه شدن است. (از ضخامت میله صرف نظر کنید یا نه، مهم نیست – ضخامت هم به نسبت درازا کوتاه می شود). ناظر می تواند با داشتن اطلاعات کوتاه شدن، به اطلاعات حرکت میله در عمق پی ببرد.
• نکته مهم:
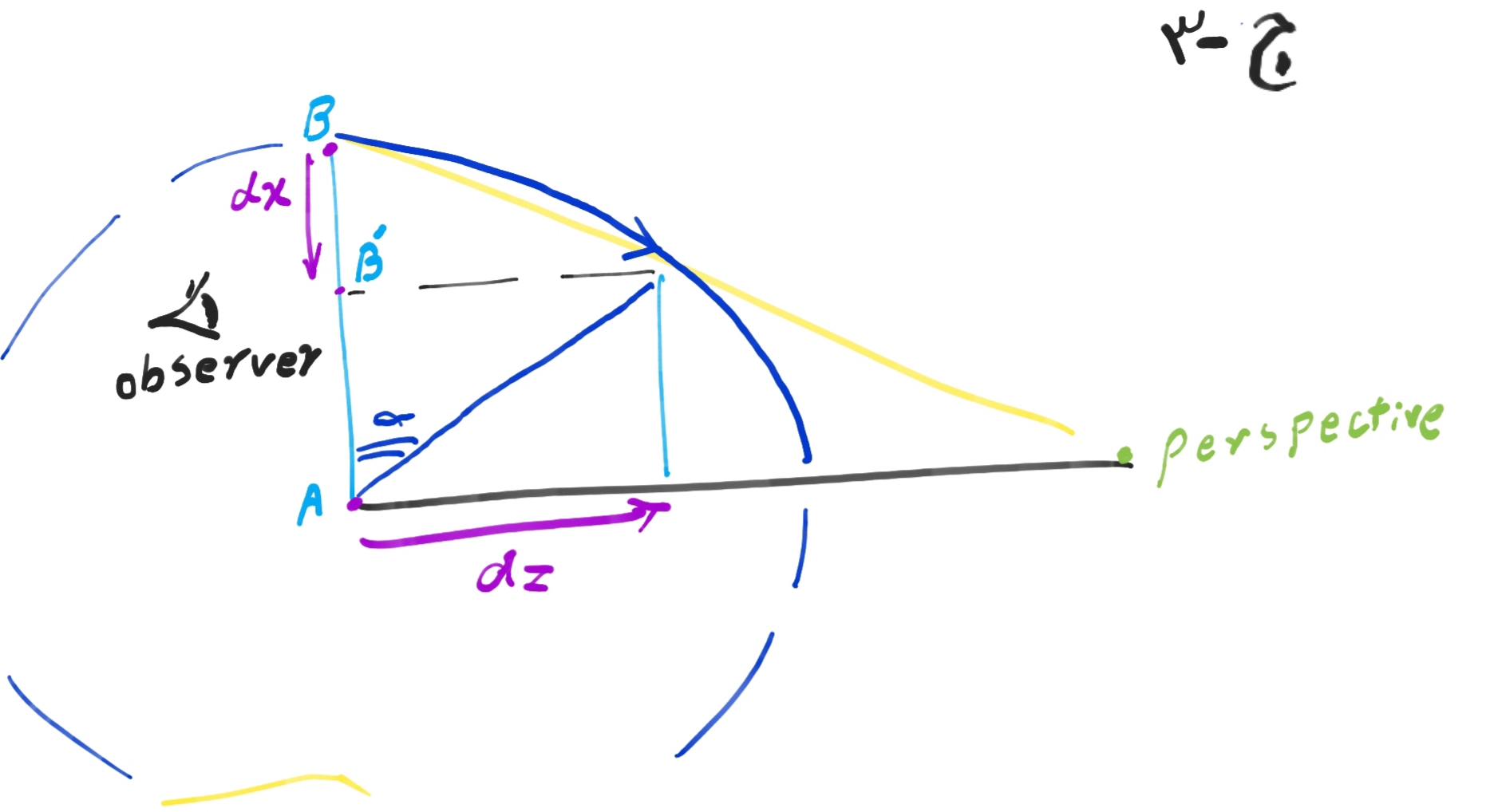
حرکت میله در عمق تا وقتی قابل ادراک است که به نقطه پرسپکتیو نرسیده باشد. مثلاً اگر در یک بازه زمانی ادراکی، میله ای از پشت چشم و مماس با ناظر، به سمت عمق حرکت کند، تا وقتی سوژه قابل ادراک است که در یک دوره زمانی حداقلی، به نقطه پرسپکتیو نرسد.
از آن به بعد، نه ضخامت و نه درازا و تغییر آنها قابل تعریف نخواهد بود (نقطه، بعد ندارد). بنابراین فاصله Dz قابل تعریف است. بردار dz روی محور Dz و بردار زمانی tz عمود بر آن قابل تعریف است. این دو بازه زمانی، بردارهایی با اندازه برابر هستند. tz=tx
اگر میله در زمان یک دوره ادراک(بازیابی اطلاعات ) tx=tz به نقطه پرسپکتیو برسد، بیشترین فاصله ممکن از دید ناظر را طی کرده است از این رو ناظر می تواند قائل به مفهوم «حداکثر سرعت ممکن» باشد. اگر میله با سرعتی بیشتر از «حداکثر سرعت ممکن» به عمق برود، در کمتر از واحد زمانی ناپدید شده و رویدادی قابل تعریف نخواهد بود.
** واحد زمانی از دیدگاه نظریه حاضر، واحدی جهانی است. سوژهای که ناپدید شود، سوژهای است که به سطح صفر می رسد و به شکل نقطهای ساکن از دید ناظر در میاید. هر سوژهای که با سرعت حداکثر به پوسته فضا زمان جهان ما برسد، در واحد زمانی- شعاع مرجع جهانی را طی کرده است.
tچ=?چ/?
زمان مرجع جهانی: چ t
شعاع جهان: چ D
سرعت نور: c
(گ چ پ ژ) راه خود را باز می کند: تعریف بردار زمانی قابل ادراک : tΔ
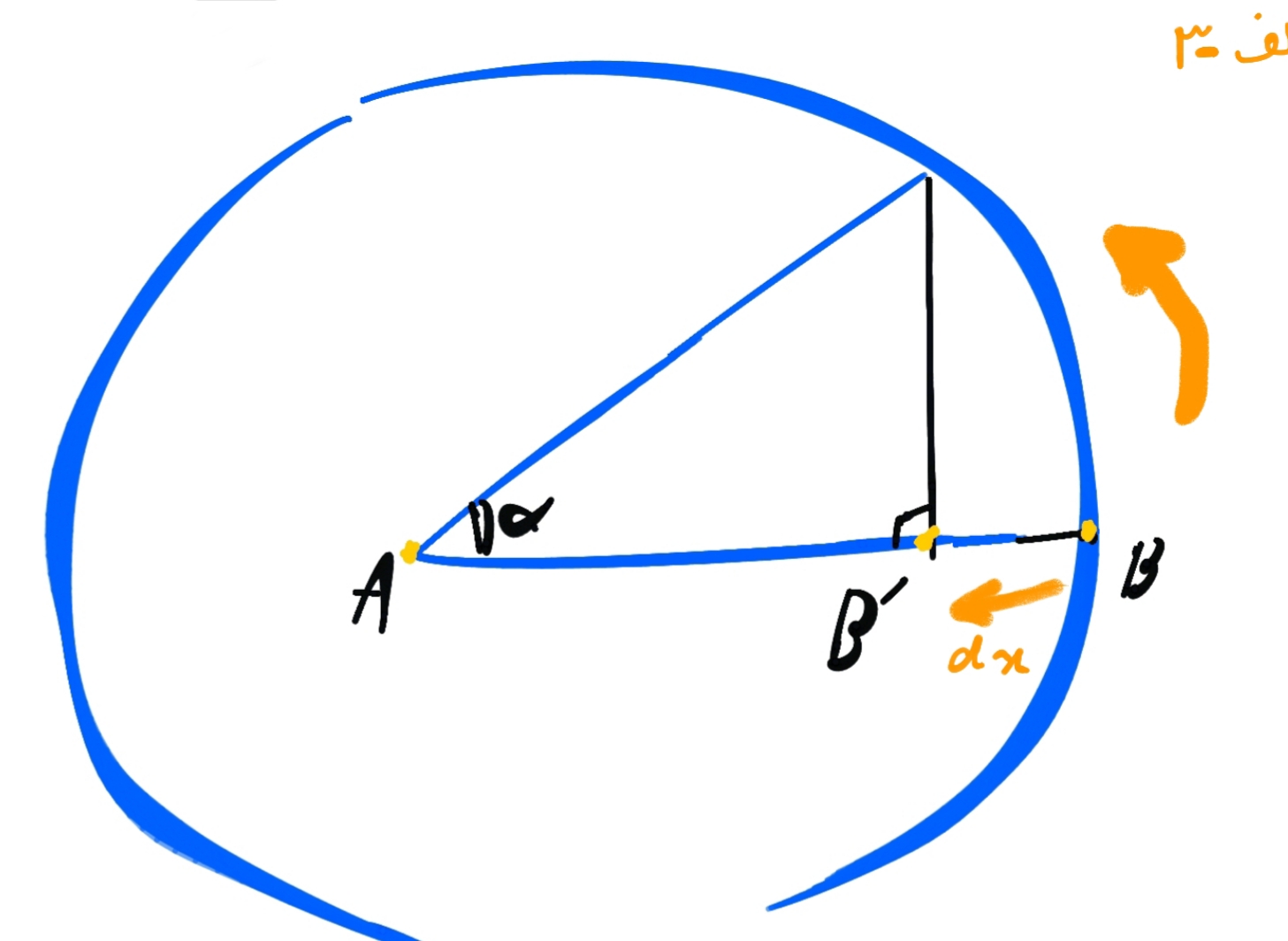
میله مثال قبل را در نظر بگیرید. اگر این میله نامرئی باشد و تنها یک سرش را رنگی کرده باشیم، برای تشخیص کوتاه شدگی، نیاز به تعریف یک نقطه رنگی دیگر روی آن خواهیم بود. اگر سر دیگرش را هم رنگی کنیم، آنگاه رویداد دور شدن میله، با “رویداد حرکت نسبی نقاط رنگی به روی میله نامرئی” متناظر خواهد بود.
همینطور می توان هر حرکتی را با چنین فرایند کوتاه شدگی متناظر دانست. در <گ چ پ ژ> همه تغییرات به شکل حرکت متغیر (سوژه) روی سطح اطلاعاتی با دو محور مرجع، بیان می شوند. تغییر در یک محور به شکل کوتاه شدگی میله خواهد بود. میله نامرئی فضاگونه را در میان دو نقطه رنگی تصور کنید که یکی مبدا ساکن و دیگری سوژه متحرک باشد. اگر یک سوژه نسبت به مبدأ (سر میله نامرئی) در یک خط راست حرکت کند، مانند این است که سوژه و مبدأ، دو نقطه رنگی روی میلهای نامرئی (فضاگونه) هستند که در عمق حرکت می کند. این چنین تناظرها در میان رویدادها، می تواند شکافی در واقعیت تعریف شده به وجود بیاورد. در ادامه خواهیم دید که (گ چ پ ژ) چگونه از چنین شکافی به درون می تابد.
ادامه دارد »»»
لابد شما هم مانند من قبول دارید کسانی که فیزیک قرن بیستم و بیست و یکم را دنبال کردهاند، همگی دچار سردرگمی مهلکی شدهاند. درگیری با پرسشهای بنیادین در باره ماهیت فضا، زمان، ابعاد پنهان، نقش ناظر، ماده تاریک، انرژی تاریک و…
دیدن لینک ها برای شما امکان پذیر نیست. لطفا ثبت نام کنید یا وارد حساب خود شوید تا بتوانید لینک ها را ببینید.

سال پیش کتابی را ترجمه کردم به نام “گرانش وجود ندارد” به قلم “Vincent Icke” استاد فیزیک با سابقه دانشگاه آمستردام. در پایان کتاب نویسنده اظهار امیدواری کرده بود که “پسری یا دختری از هزاره جدید” زودتر دست به کار شود و طرحی نو دراندازد. در این کتاب آمده: «علم همانند اسلوب تاریخ انسانی یا معماری مدرن، پیشرفت نمی کند: تکه تکه کردن و سوزاندن، منفجر کردن و نابود کردن، و بر روی ویرانه ها چیزی ساختن که به هیچ وجه مشابه قبل نیست. برعکس، یک دانشمند خوب بیشتر شبیه یک دندانپزشک خوب است: دور انداختن هر چه را نمی توان نگه داشت، بقیه را همانطور که بوده باقی گذاشتن، نصب جایگزینها، و بهبود عملکرد کلی.»
هر چند من فیزیکدان متخصص نیستم، ولی دندانپزشک هستم و شاید از سر مطایبه بتوان گفت همین شد که بالاخره تصمیم گرفتم “فیزیک خودفهم” خودم را بنا کنم. نتیجه آن سفرنامهای یکساله از پرسه زدن در مفاهیم فیزیک شد. از ساده ترین ادراکهای مشترک سفرم را شروع کردم(مانند اینکه ما همواره جهان را دو بعدی می بینیم، یا ما فقط حرکت –تغییر را می بینیم نه خود فضا زمان به عنوان “یک چیز”،یا تناظر حرکت چرخشی و خطی و ..). در این مسیر به موضوعات متفاوتی در فیزیک و ریاضی برخوردم. سعی کردم آنچه را از نشانه ها میفهمم، به نگارش در بیاورم. از آنجا که ذهن من به زبان فارسی می اندیشد، نشانههای فارسی را بکار بردم. در این فرضیه زمان دو بعد دارد که سطحی از اطلاعات را بیان می کنند. هر آنچه توسط “ناظر” دریافت می شود،”اطلاعات” یک “رویداد” است که در قالب یک”جهان” بیان می شود.
<گ> به معنی رویداد.
<چ> به معنی جهان.
<پ> ناظر و
<ژ> اطلاعات هستند.
• اگر کمی گیج شدهاید حق دارید. اما از شما میخواهم که با من در این سفر همراه باشید. در این مسیر خواهیم دید که چگونه به پرسشهای عمیق و اسرارآمیز فیزیک و نجوم پاسخ خواهیم داد. شاید فهرستی از مفاهیم و نتایج معادلات این نظریه که با مقادیر اندازهگیری شده موافق است، شما را ترغیب کند:
۱-مفهوم زمان-فضا
۲- مفهوم دما
۳- مفهوم جهان هابلی
۴- ماده تاریک
۵- انرژی تاریک
۶- اندازهگیری فرکانس تابش پس زمینه کیهانی
۷- اندازهگیری دمای فضای خالی در جهان ما
۸- اندازهگیری شعاع پروتون و الکترون
۹- اندازهگیری شعاع اتمی هیدروژن
۱۰- اندازهگیری شعاع جهان
۱۱- اندازهگیری بار الکتریکی پایه
۱۲- و شاید مهمتر از همه اندازهگیری “ثابت ساختار ریز”
• اگر دانستههایی از ریاضیات و فیزیک دانشگاهی نداشته باشید، شاید پیش رفتن در همه مباحث کمی مشکل باشد. ولی ماهیت کلی مباحث سرراست است و در هر فصل تلاش کردهام که از معادلات مربوطه بیاورم تا خواننده مشتاق بهتر واکاوی کند. بالاخره این فرضیه در قالب یک کتاب، جمعآوری شد و نسخهای برای اغلب فیزیکدانان دانشگاههای داخلی و خارجی ارسال شد.
ولی آنچه مرا وادار به نگاشتن این فرضیه کرد، تحریک دوستداران و دانش آموختگان جوان بود تا با ذهنی منعطف، امکان وجود چارچوبی تازه بیازمایند. در چند قسمت آینده مباحثی از آشنایی با مفاهیم اولیه فرضیه را خواهم نوشت. هدف نهایی این است که بعد از ترجمه به زبان انگلیسی و ویرایش نهایی، با همکاری “سایت علمی بیگ بنگ” کتاب را چاپ و در اختیار علاقمندان قرار دهیم. از اینرو از همه خوانندگان خواهش میکنم، نظرات خود را با من در میان بگذارند.
دیدن لینک ها برای شما امکان پذیر نیست. لطفا ثبت نام کنید یا وارد حساب خود شوید تا بتوانید لینک ها را ببینید.

حرکت به معنای اطلاعات:
در این فرضیه، جهانی تعریف می شود که باید مورد ادراک قرار بگیرد. ادراک، بنیان اصلی جهان می باشد. هر رویداد «گ»، حاصل تعامل جهان «چ» و ناظر «پ» می باشد. در واقع رویداد به شکل واحدهایی از اطلاعات «ژ» دریافت می شود. وجود اطلاعات، به معنای وجود تغییر میان دو حالت متوالی از جهان است. سادهترین نوع تغییر، حرکت است. حرکت مبنایی را فراهم می کند که از طریق آن می توان زمان و مکان را تعریف کرد.
حرکت به دو معنا قابل بررسی است:
۱-حرکت در بعد فضایی:
میزان تغییر در موقعیت فضایی سوژه، میزان اطلاعات را تعیین می کند.
۲-حرکت در بعد زمانی:
این حرکت توسط ناظر و به روی محور زمانی انجام می شود.
• در نظریه (گ چ پ ژ)، ناظر، ماشین ادراک جهان است. نوعی ماشین که با حرکت در بعد زمانی، تغییرات را درک کرده و اطلاعات را پردازش می کند. حداقل شرط لازم، داشتن واحدهای زمانی به روی محورهای زمانی است. در این حالت، ناظر در هر دوره دریافت و پردازش اطلاعات، مقدار تغییر را درک کرده و اطلاعات به واحد بعدی زمانی منتقل می شود.
• تحلیل حرکت – ابعاد مکانی – زمانی:
برای توصیف کامل حرکت یک سوژه، توسط ناظر {مثل خود ما }؛ باید نخست به سه نکته توجه داشت:
1.ناظر اطلاعات جهان را روی صفحه دوبعدی دریافت می کند. از این رو همه اشیاء به صورت موجودات دوبعدی ظاهر می شوند :
یک شیئی سه بعدی، ابتدا به شکل یک تصویر دوبعدی دریافت می شود.
تشخیص بعد عمقی (بعد سوم) سوژه، منوط به دریافت اطلاعات بیشتر است. این اطلاعات را می توان با چرخاندن شیئی به دور یک محور و با چرخاندن شیئی – ناظر نسبت به هم، بدست آورد.
۲-همه حرکتها را می توان در یک صفحه دو بعدی بیان کرد:
حرکت همزمان در سه بعدی بی معناست.
(در واقع همانطور که خواهیم دید، حرکت در سه بعد به معنای وجود انرژی است).
البته، در مورد موقعیت نسبی سوژه و ناظر، حرکت همزمان در دو بعد هم بی معناست. همه حرکتها را در حالت حداقلی (دیفرانسیلی) می توان حرکت در یک محور (یک بعدی) دانست. از آنجا که چارچوب مرجع وجود ندارد، یکی را ناظر ثابت و دیگری را سوژه متحرک می بینیم. حرکت نسبی را میتوان روی یک محور خط واصل سوژه-ناظر، تعریف کرد.
حرکت همزمان در دو بعد، به معنای تغییر در اندازه سطحی سوژه است. چنین تغییری در حرکت عمقی (به سمت عمق صفحه دریافت اطلاعات از جهان) دیده می شود. اگر چه این حرکت به شکل نقطهای از دید ناظر، مخفی می باشد، ولی اطلاعات حرکت در محور عمقی را میتوان از تغییر سطح سوژه ( عمود بر حرکت) دریافت.
• در فرضیه (گ چ پ ژ) همه انواع حرکتها، قابل تأویل به حرکت دو بعدی خواهند بود. هر بعد مکانی، متناظر با یک بعد زمانی خواهد بود. از این رو برای تحلیل یک رویداد، فضایی چهار بعدی تعریف می شود.
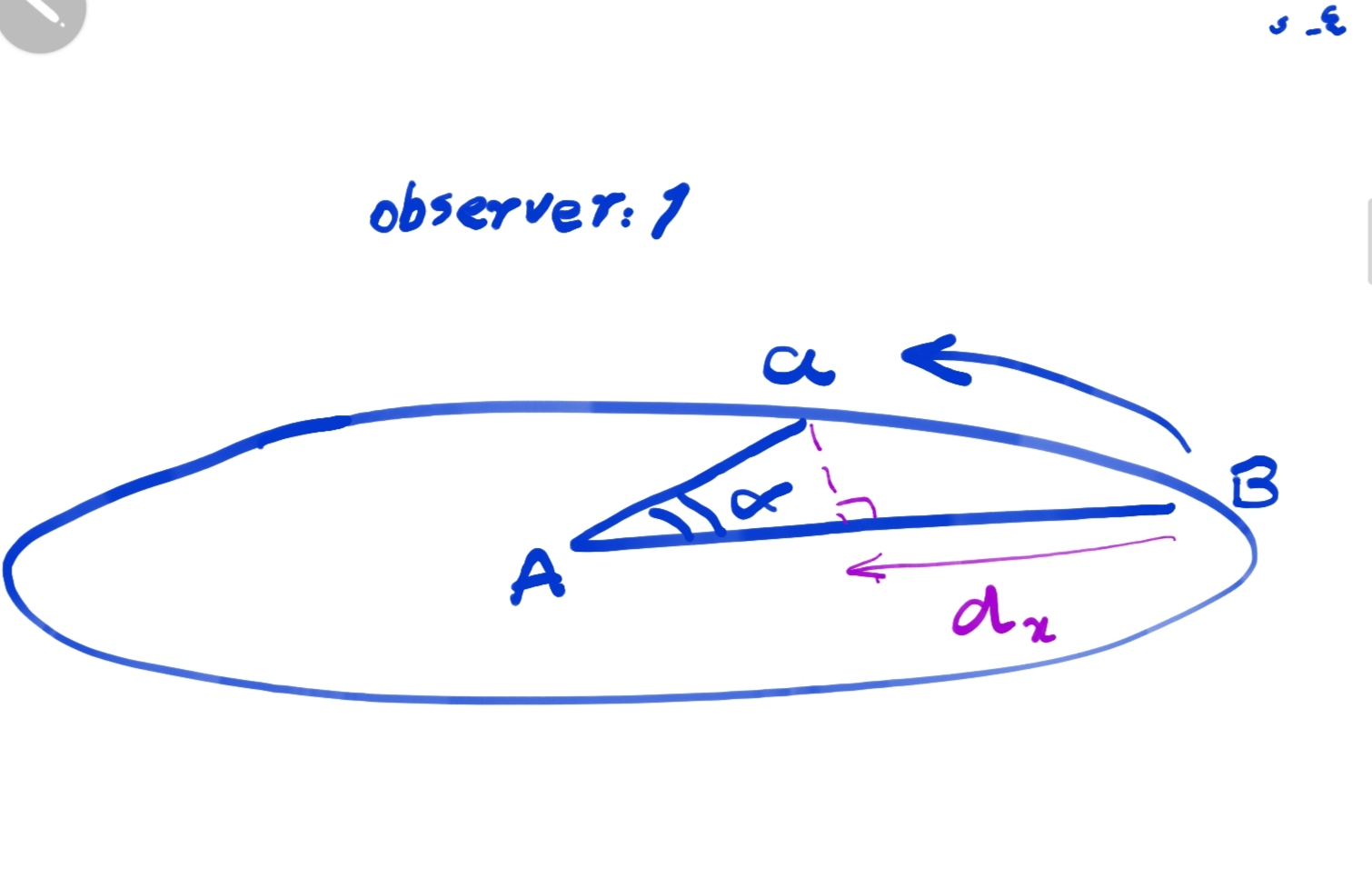
• برای روشن شدن موضوع، حرکت یک جعبه سه بعدی در عمق تصویر را در نظر می گیریم.(شکل ۱-الف)
دیدن لینک ها برای شما امکان پذیر نیست. لطفا ثبت نام کنید یا وارد حساب خود شوید تا بتوانید لینک ها را ببینید.
شکل الف
در جابجایی شیء سه بعدی، اطلاعات به شکل تغییر دو سطح مورد مشاهده (سطح مقطع)، بیان می شود. مثلاً با دور شدن شیئی، سطح مورد مشاهده کوچکتر می شود. برای ناظر، حرکت شیئی سه بعدی در عمق، از طریق تغییر در سطح مورد مشاهده، قابل درک است. برای سادهسازی، می توان یکی از اضلاع (ابعاد) سطح مقطع جعبه را به عنوان محور تغییر، تعریف کرد. در واقع تغییرات سطح، مجذور تغییرات روی یک محور است.
۳-نکته مهم آخر در توصیف حرکت: ناظر، جهان را به شکل دورهای ادراک می کند.
این به معنای وجود یک بازه زمانی مرجع، به روی محور ناظر است. بدون داشتن یک واحد زمانی، تغییرات قابل تعریف نیستند. در واقع سرعت تغییرات به عنوان واحد اطلاعات غیرقابل بیان خواهد بود. از این رو هر حرکتی به هر میزانی از اندازه و با سرعت دلخواه، به معنای یک تغییر صرف بوده و با بقیه متمایز نخواهد بود.
در این حالت شتاب و نیرو قابل تعریف نخواهند بود. ناظری را تصور کنید که در دورههای زمانی نامساوی به یک حرکت شتابدار نگاه می کند. در مورد جابجایی سوژه در حرکت خطی داشتیم:
dx = ½ at2 + v0 t
اگر ناظر نتواند رویداد را در واحدهای زمانی مساوی بیان کند، مقدار t را تعیین نمی کند. او قادر به ادراک (پردازش) اطلاعات رویداد نخواهد بود.{مقدار شتاب a نامعین خواهد بود}
او رابطه dx2 با dx1 را برقرار نخواهد کرد و جهان را ادراک نمی کند.
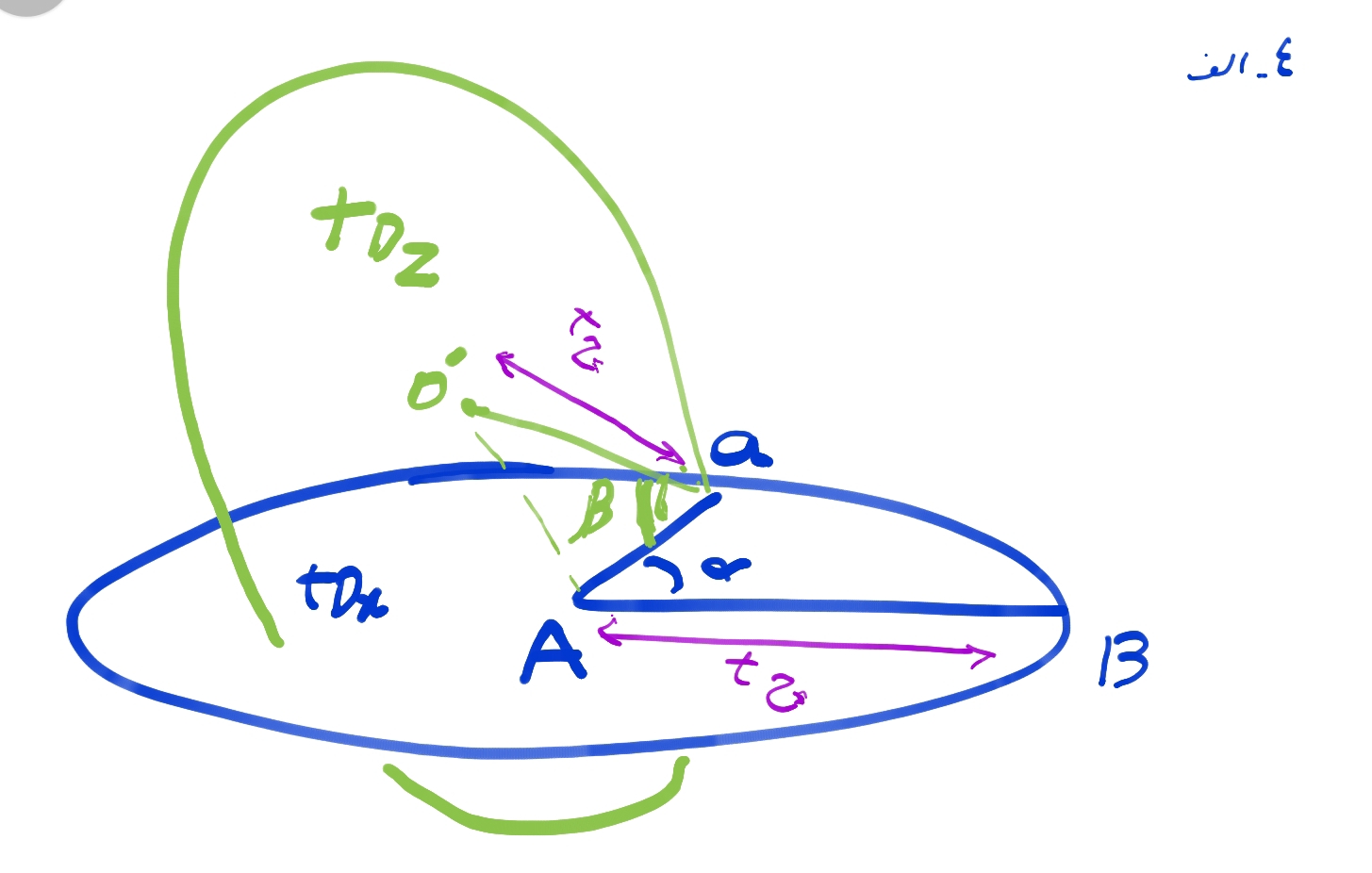
• ناظر با تعریف بردار زمان، حرکت خود در محور زمان را تصویر می کند. روی این محور، بردار یکه tx را تعریف می کنیم؛ تشخیص رویداد، در بازههای زمانی tx صورت می گیرد. بردار زمان tx عمود بر بردار حرکت مکانی قابل تعریف است. از دیدگاه <گ چ پ ژ>، زمان به عنوان بردار اولیه اطلاعات، عمود بر بعد مکانی حرکت است. زمان نه به روی محور بلکه به شکل سطح زمانی تغییر(دیفرانسیلی) برای ناظر درک می شود.
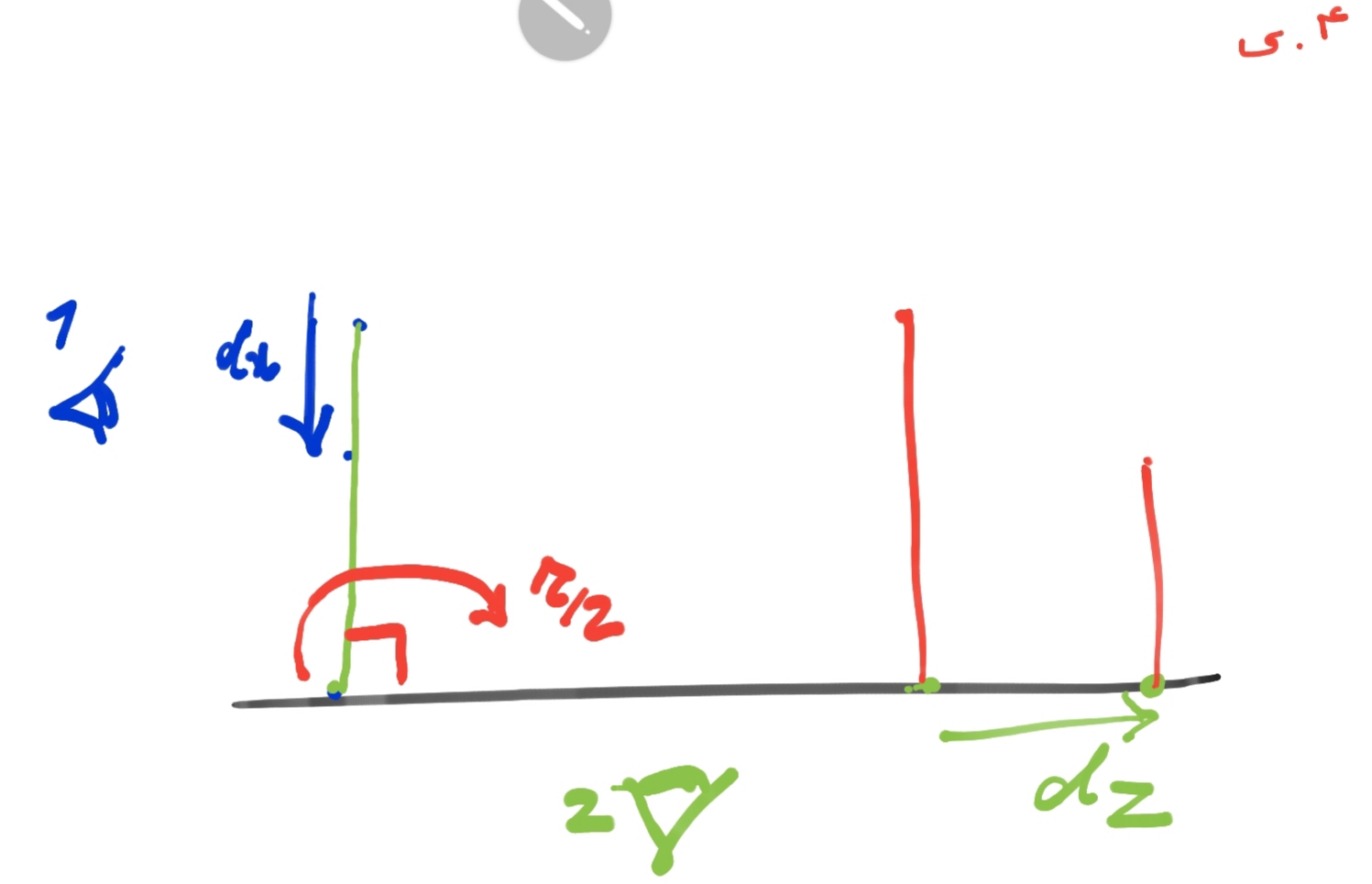
– تشخیص حرکت در عمق، تعریف بردار زمانی دوم:
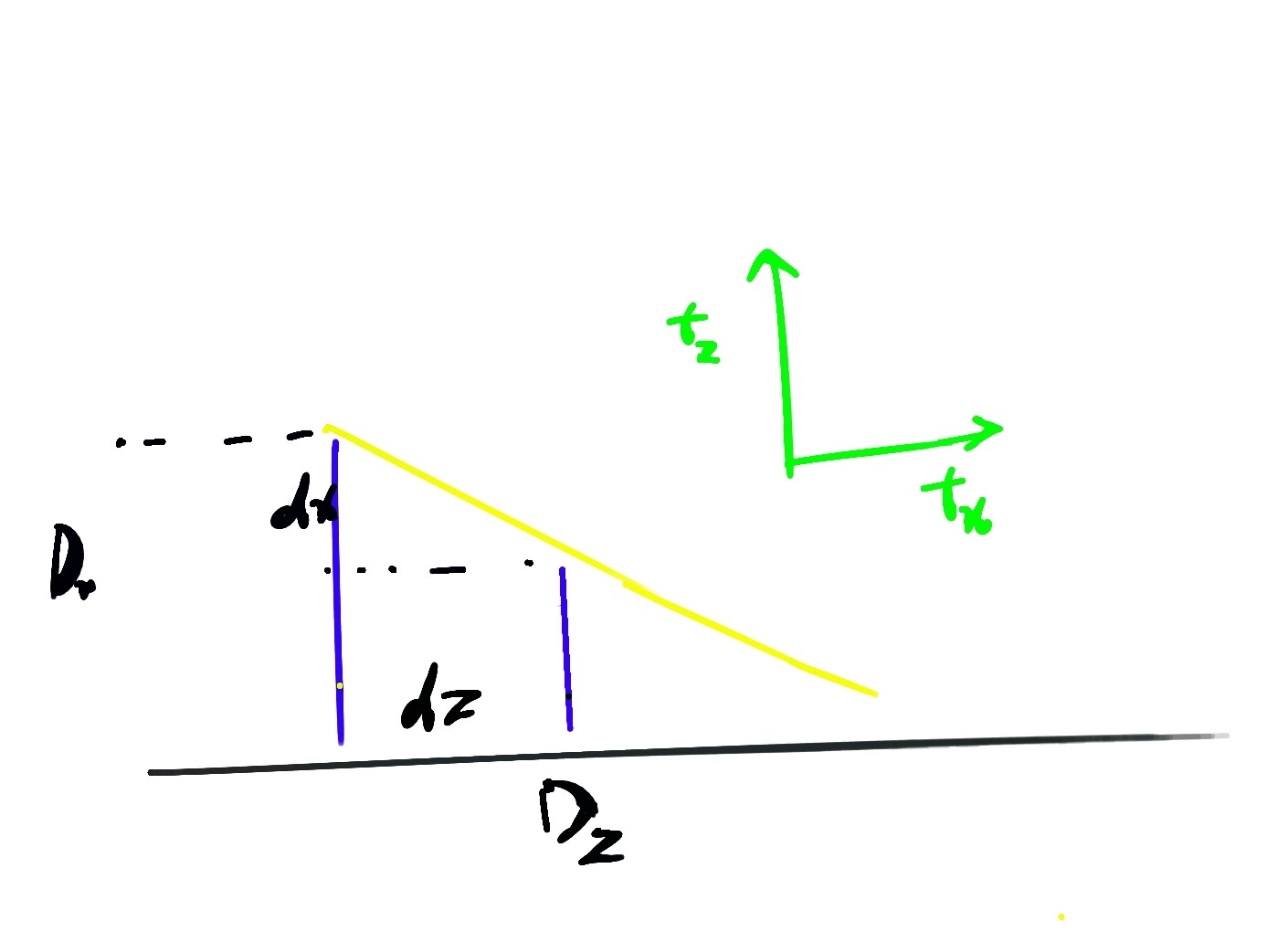
میلهای را تصور کنید که روبروی ناظر ایستاده است و به سمت عمق، از ناظر دور می شود. ناظر در سطح مقطع رویداد، تنها میلهای را می بیند که در حال کوتاه شدن است. (از ضخامت میله صرف نظر کنید یا نه، مهم نیست – ضخامت هم به نسبت درازا کوتاه می شود). ناظر می تواند با داشتن اطلاعات کوتاه شدن، به اطلاعات حرکت میله در عمق پی ببرد.
• نکته مهم:
حرکت میله در عمق تا وقتی قابل ادراک است که به نقطه پرسپکتیو نرسیده باشد. مثلاً اگر در یک بازه زمانی ادراکی، میله ای از پشت چشم و مماس با ناظر، به سمت عمق حرکت کند، تا وقتی سوژه قابل ادراک است که در یک دوره زمانی حداقلی، به نقطه پرسپکتیو نرسد.
از آن به بعد، نه ضخامت و نه درازا و تغییر آنها قابل تعریف نخواهد بود (نقطه، بعد ندارد). بنابراین فاصله Dz قابل تعریف است. بردار dz روی محور Dz و بردار زمانی tz عمود بر آن قابل تعریف است. این دو بازه زمانی، بردارهایی با اندازه برابر هستند. tz=tx
دیدن لینک ها برای شما امکان پذیر نیست. لطفا ثبت نام کنید یا وارد حساب خود شوید تا بتوانید لینک ها را ببینید.
شکل ب
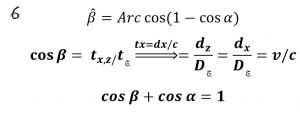
اگر میله در زمان یک دوره ادراک(بازیابی اطلاعات ) tx=tz به نقطه پرسپکتیو برسد، بیشترین فاصله ممکن از دید ناظر را طی کرده است از این رو ناظر می تواند قائل به مفهوم «حداکثر سرعت ممکن» باشد. اگر میله با سرعتی بیشتر از «حداکثر سرعت ممکن» به عمق برود، در کمتر از واحد زمانی ناپدید شده و رویدادی قابل تعریف نخواهد بود.
** واحد زمانی از دیدگاه نظریه حاضر، واحدی جهانی است. سوژهای که ناپدید شود، سوژهای است که به سطح صفر می رسد و به شکل نقطهای ساکن از دید ناظر در میاید. هر سوژهای که با سرعت حداکثر به پوسته فضا زمان جهان ما برسد، در واحد زمانی- شعاع مرجع جهانی را طی کرده است.
tچ=?چ/?
زمان مرجع جهانی: چ t
شعاع جهان: چ D
سرعت نور: c
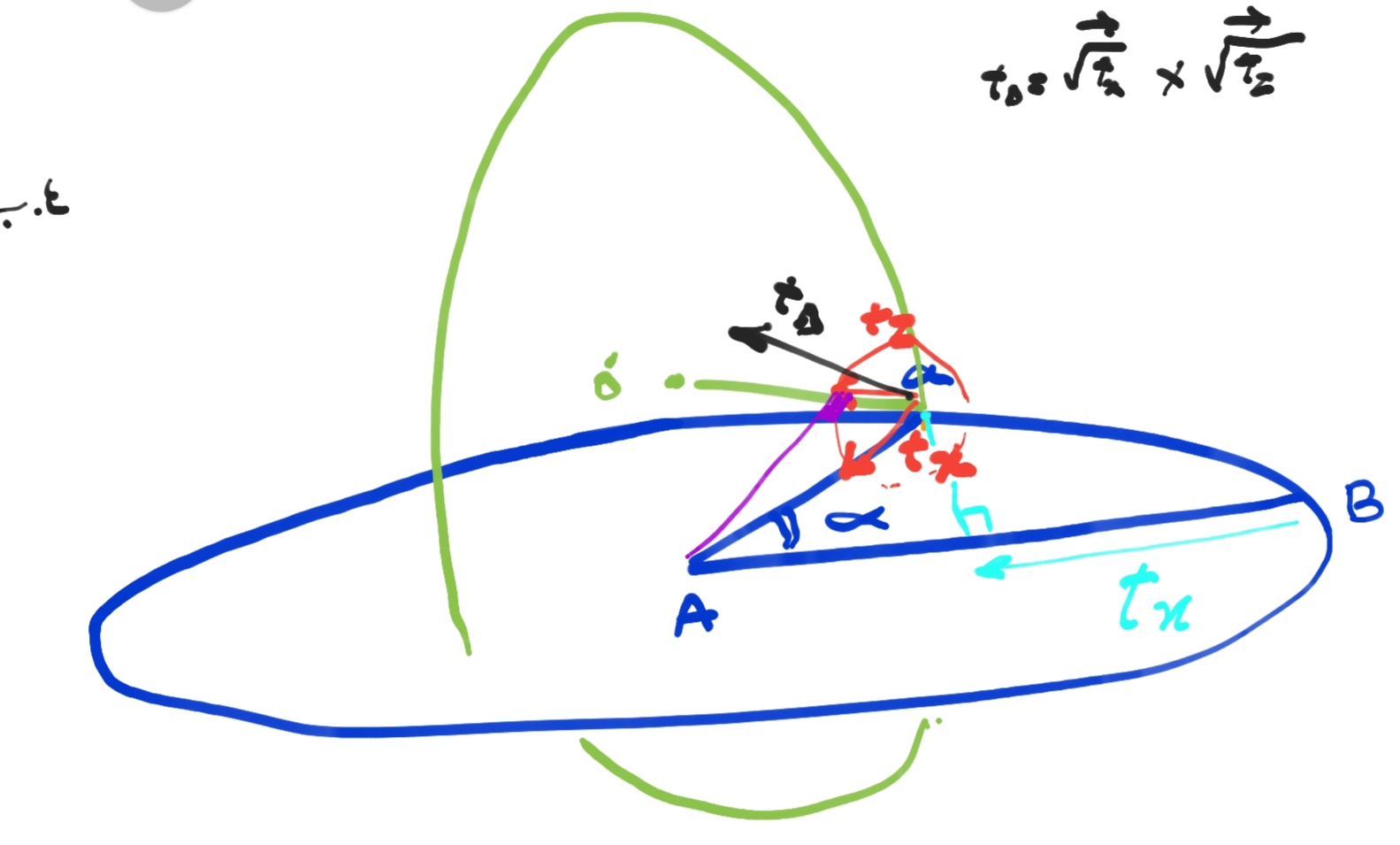
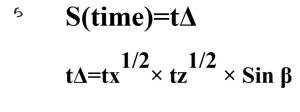
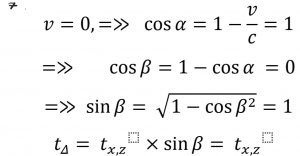
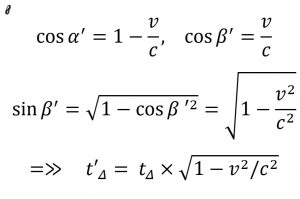
(گ چ پ ژ) راه خود را باز می کند: تعریف بردار زمانی قابل ادراک : tΔ
میله مثال قبل را در نظر بگیرید. اگر این میله نامرئی باشد و تنها یک سرش را رنگی کرده باشیم، برای تشخیص کوتاه شدگی، نیاز به تعریف یک نقطه رنگی دیگر روی آن خواهیم بود. اگر سر دیگرش را هم رنگی کنیم، آنگاه رویداد دور شدن میله، با “رویداد حرکت نسبی نقاط رنگی به روی میله نامرئی” متناظر خواهد بود.
همینطور می توان هر حرکتی را با چنین فرایند کوتاه شدگی متناظر دانست. در <گ چ پ ژ> همه تغییرات به شکل حرکت متغیر (سوژه) روی سطح اطلاعاتی با دو محور مرجع، بیان می شوند. تغییر در یک محور به شکل کوتاه شدگی میله خواهد بود. میله نامرئی فضاگونه را در میان دو نقطه رنگی تصور کنید که یکی مبدا ساکن و دیگری سوژه متحرک باشد. اگر یک سوژه نسبت به مبدأ (سر میله نامرئی) در یک خط راست حرکت کند، مانند این است که سوژه و مبدأ، دو نقطه رنگی روی میلهای نامرئی (فضاگونه) هستند که در عمق حرکت می کند. این چنین تناظرها در میان رویدادها، می تواند شکافی در واقعیت تعریف شده به وجود بیاورد. در ادامه خواهیم دید که (گ چ پ ژ) چگونه از چنین شکافی به درون می تابد.
ادامه دارد »»»



![[-]](http://www.flashkhor.com/forum/images/collapse.gif "[-]")



